wenn ich das richtig verstehe, willst du in den Zylinder eine Feder einbauen, die den Kolben nach außen drückt und auf der Blauen Achse eine Angelschnur, die den Kolben nach innen zieht. Das sollte vom Prinzip her erst mal möglich sein, hängt allerdings vom Modell ab. Wenn du wie auf dem Bild zu sehen einen Bagger bauen möchtest, dann wird das nichts. Das Gewicht des Armes liegt in deinem Fall auf der Feder. Damit kannst du nicht baggern, da du mit der Feder nicht die benötigte Kraft aufbauen kannst. Beim Bagger muss die Angelschnur die folgenden Funktionen ausführen: Arm heben, Stiel zum Bagger, Löffel schließen. Mit deinem Design wäre es genau falsch herum
ich habe in meinem Kipper einen RX-43-D1 und einen MotortinyII verbaut. Wenn ich nun im Sender bei eingeschaltetem Modell auf meinen Bagger wechsele, dann geht der Empfänger des Lkw in Standby. Dabei fängt der Motortiny (das Bremslicht) aber wie wild zu blinken an. Hatte jemand schon mal dieses Problem und konnte es lösen?
Hier der originale Herpa Actros (Alle vier Achsen liegen auf):
Und hier mit den verbauten Lenkungsteilen (Die vorderste Achse hängt in der Luft):
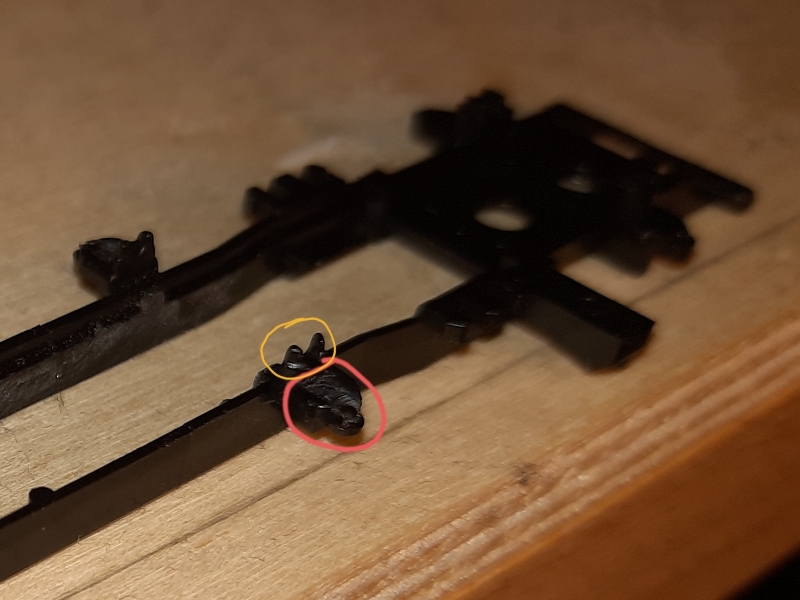
Und hier das umgebaute Fahrgestell mit dem markierten Bereich (rot), wo ich auf beiden Seiten etwas weggefeilt habe:
Es scheint so, als sei im Fahrgestell der Abstand zwischen oberer Lenkaufnahme (rot) und der Achsaufnahme (gelb) zu klein, bzw. die obere Lenkaufnahme (rot) sitzt zu tief. Ohne Lenkachse passt das, aber mit sorgt das dafür, dass die zweite Lenkachse zu tief sitzt. Bei einem MAN oder Scania Fahrgestell tritt das Problem nicht auf. Die Zugmaschine hat auch mit Lenkungsteilen Kontakt auf allen vier Achsen.
Es handelt sich bei den Bildern um 3 verschiedene Modelle. Bei dem Weißen wurde nur das Fahrgestell geöffnet um die Lenkungsteile einzubauen. Daher meine Annahme, dass es sich um einen Konstruktionsfehler seitens Herpa handelt.
ich hatte vor eine Actros SLT Schwerlastzugmaschine zu bauen und bin dabei auf ein Problem gestoßen. Ich habe bisher nur zum Test die Herpa Lenkungsteile verbaut und der Actros steht nicht mehr flach auf der Straße. Es scheint als ob die 2. Lenkachse ca. 1mm tiefer sitzt als die restlichen 3 Achsen. Wenn ich den Halter umdrehe wird es nur noch schlimmer.
Hattet ihr schon mal dieses Problem? Und wenn ja wie habt ihr es gelöst?
geändert hatte ich nichts. Habe jetzt allerdings mal den Unterwagen abgeklemmt (Also die beiden ER100) und der Bagger funktioniert wieder. Es scheint also an den ER100 zu liegen.
verbaut ist der 180 mAh Lipo von Sol-Expert. Die Leds beider RX43 blinken 1x und bleiben dann aus. Der Lipo wurde mit dem USB-Ladegerät von Sol-Expert geladen. Es liegen aktuell 4,2 V an. Der Lipo müsste 10 C haben.
kann es sein, das 2x RX43 mit 2x ER100 und 6 Motoren zu viel für den Lipo sind? Oder dass die RX sagen das ist zu viel? Ich habe meinen Bagger heute geladen und nun hat er wieder das Problem, dass er sofort aus geht, wenn ich das Modell anschalte.
ich verstehe, dass Theorie und Praxis nicht das selbe ist. ABER: Wir reden hier über 3D-Druck. Und zumindest für mich ist es nicht Sinn der Sache, mir übertrieben gesagt Standardprofile zu drucken um dann mit meinem Proxxon oder Dremel drauf los zu bauen. Und um ein Modell zu Drucken, welches auch funktioniert, muss ich mich vorher mit der Theorie beschäftigen, da ich es ja nicht austesten kann.
Zumindest nicht so einfach, denn klar ich kann das Modell ausdrucken und schauen ob es passt. Und wenn nicht, dann ändere ich das. Wenn man selbst einen Drucker hat, mag das funktionieren, wenn man seine Sachen aber drucken lässt, halte ich das auf Dauer nicht für praktikabel. Oder macht ihr das so?
Ich bin Neuling und habe das Thema erstellt um zu erfahren, auf was man achten muss, damit die Teile am Ende passen. Wenn das Ergebnis ist, dass ich keine Toleranzen zu beachten brauche, umso besser.
für meinen Radlader habe ich mir jetzt den RSL Kompakt bestellt.
@Chantal Ja, sicherlich möglich. Da sehe ich allerdings den Vorteil gegenüber meiner aktuellen Variante (noch?) nicht.
Vermutlich hätte ich die Themen trennen sollen. Auf den Bagger bezogen sich eig. nur die Fragen nach der Isolierung und der Kabeldurchführung. Das Problem mit dem Empfänger bestand bisher nur für den Radlader.
hab mir jetzt das Video zur Deltang programmierung angeschaut und ich denke ich habe verstanden wie das mit der Programmierung funktioniert. Hab mir auch die Deltang-Homepage angesehen.
Nun bin ich zu der Schlussfolgerung gekommen, dass der RX43 nicht ausreicht um die Funktionen, die ich haben möchte, zu schalten.
Das wären für den Radlader: 1. Motor zum Fahren 2. Motor zum Arm heben 3. Motor für die Schaufel 4. Lenkservo 5. Licht 6. Arbeitslicht 7. Blinker links 8. Blinker rechts 9. Bremslicht 10. Rückfahrscheinwerfer 11. Rundumleuchte
Nach meiner Recherche hier im Forum gibt es wohl zwei Lösungsansätze:
1. Ich bleibe bei dem RX43 D32 und kaufe mir ein Schalttiny fürs Licht oder 2. Ich programmiere einen RX43 D2 und kaufe mir ein Motortiny.
Preislich macht das keinen großen Unterschied und auch der Platzbedarf scheint annähernd identisch zu sein.
Damit stellt sich nun die Frage, was von beiden die bevorzugte Lösung für einen Radlader wäre?
 Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
Sie sind vermutlich noch nicht im Forum angemeldet - Klicken Sie hier um sich kostenlos anzumelden
 Mikromodell-Chat
Mikromodell-Chat
 2
2


 21.11.2023 09:25
21.11.2023 09:25